Research
Our research is divided into four main groups (G1-G4) working in harmony to develop an integrated autonomous robotic system for extreme environments.
G1: Intelligent Autonomous Robot Mobility System
Lead: Prof. Pilwon Hur (GIST) | Postdocs: 7
The G1 group focuses on developing hybrid mobility systems capable of traversing complex terrains (such as 10° ice slopes, snow, and rocks) in extreme cold (-50°C).
- Key Research: Extreme cold joint drives, probability-based RL walking policies, multi-modal perception in blizzards/whiteouts, precision manipulation at -30°C, and Human-Robot Interaction (HRI).

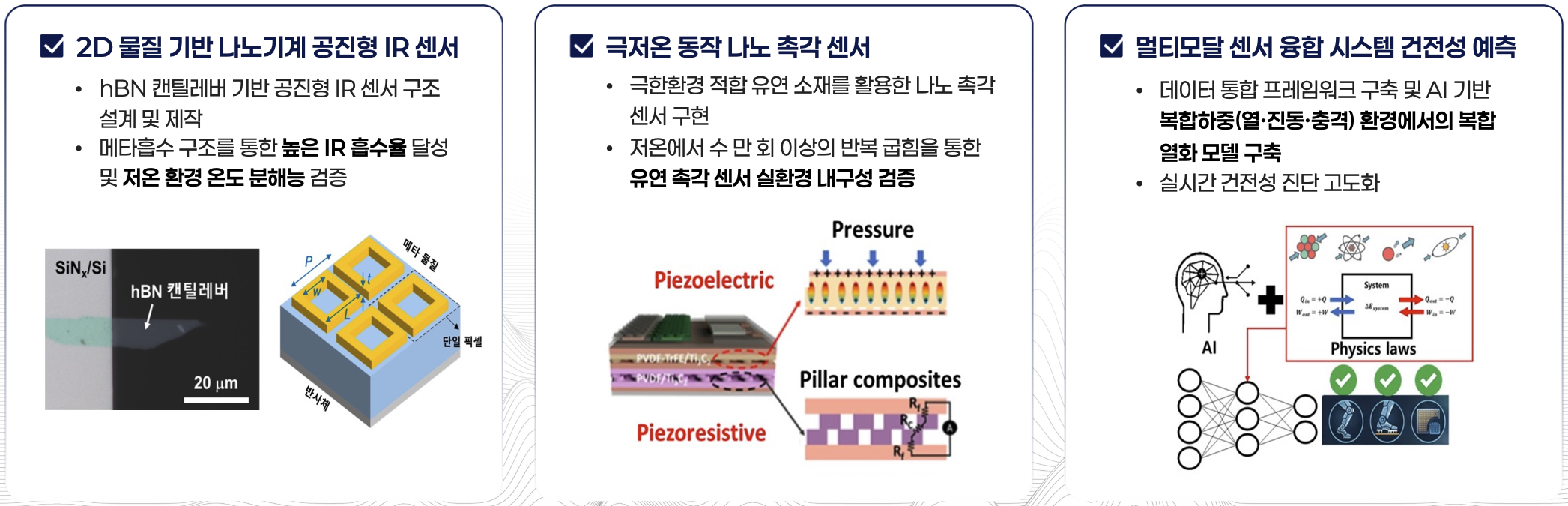
G2: Advanced Sensors and Health Management for Extreme Environments
Lead: Prof. Jaehun Seol (GIST) | Postdocs: 5
This group specializes in developing robust sensors and predictive health management (PHM) models for systems operating in extreme conditions.
- Key Research: hBN cantilever-based resonant IR sensors (operating at -50°C), extreme cold nano-tactile sensors (40,000 cycle durability), and physics-informed AI for complex degradation modeling.
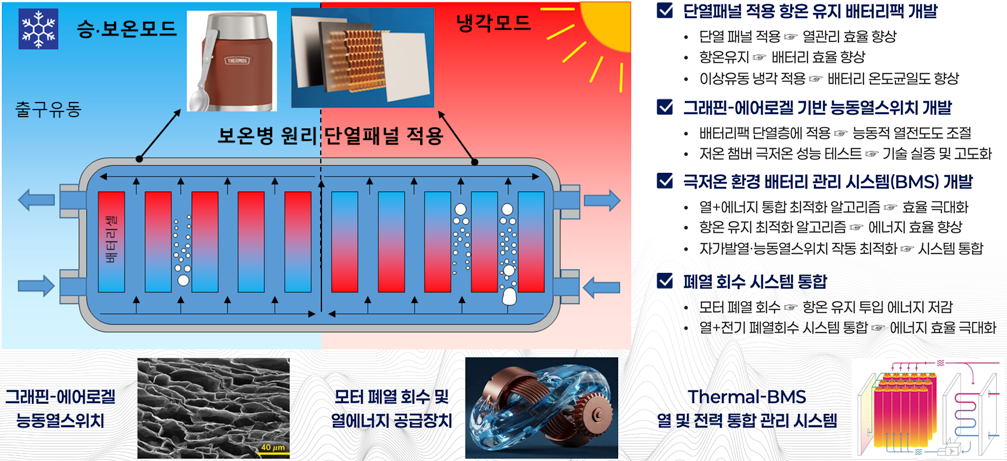
G3: High-efficiency Energy Management System
Lead: Prof. Seunghyun Lee (GIST) | Postdocs: 6
Energy management is critical under -50°C constraints. G3 develops advanced battery packaging and thermal management technologies.
- Key Research: Thermos-bottle principle (vacuum insulated) battery thermal management, AI-based energy integration, active thermal switches (1300% variable thermal conductivity), and extreme cold charge-capable Li-ion materials.
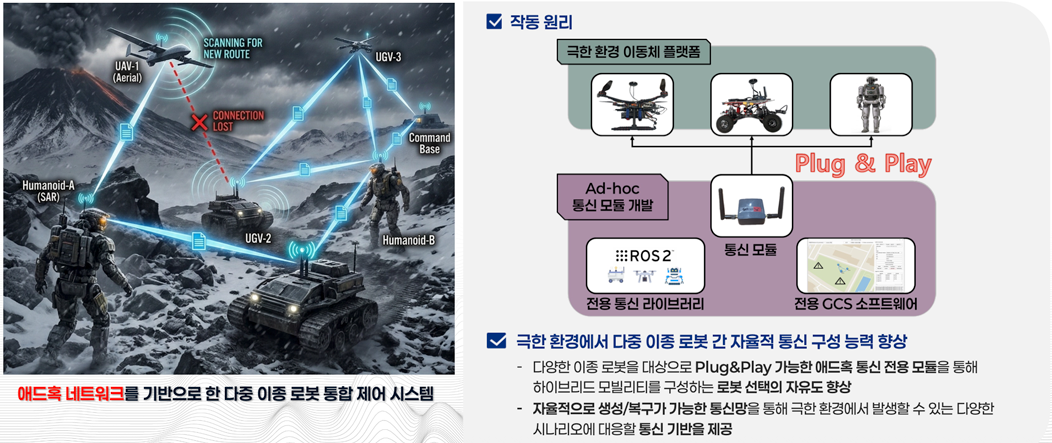
G4: Extreme Environment Communication and System Integration
Lead: Prof. Jaewook Lee (GIST) | Postdocs: 7
G4 is responsible for integrating the subsystems and maintaining connectivity across diverse, unreliable operational conditions.
- Key Research: Ad-hoc and DTN (Delay Tolerant Network) hybrid protocols, ROS2 common interfaces for plugging diverse modules, and an adaptive mission manager for real-time emergency replanning.